如何通过五个核心步骤掌握矢量拉力试验设备操作技巧
第一步:吃透设备原理和力学基础,而不是只会“按按钮”
刚接触矢量拉力试验设备时,很多人第一反应是先记操作面板,其实这恰恰是最容易走弯路的做法。我自己的原则是:先搞清楚设备背后的物理逻辑,再去记菜单和按键。矢量拉力设备本质上是在受控条件下施加单轴或多轴载荷,并实时采集位移、力值和时间信号,最终得到应力–应变曲线和多维载荷向量。如果你连材料的弹性区、屈服点、塑性阶段和断裂特征都不清楚,只会生硬照着标准做试验,结果很容易是“数据好看但不可信”。建议先搞明白三个核心概念:载荷闭环控制(力控、位移控、应变控的区别和适用场景)、传感器信号链(加载装置、传感器、放大器、采集卡、软件显示)以及矢量加载的含义(例如拉–扭耦合试验中不同通道的相位和比例控制)。当你脑子里有了这张“原理地图”,再去看设备说明书和软件界面,你会发现很多原来看不懂的参数(如采样频率、滤波方式、控制增益、目标曲线)都能找到对应的物理含义,也更容易判断哪些设置是关键、哪些只是“锦上添花”的辅助选项。
关键要点:先原理后操作
在这一阶段,我通常会给新同事三个落地要求:第一,能用自己的话画出载荷–时间和应力–应变的典型曲线,并标出各阶段的物理意义,而不是照书念名词;第二,能口头解释“为什么这台设备要这样布置传感器和加载头”,比如上拉下固、下拉上固、双向加载的差异,以及对试样装夹刚度和对中性的影响;第三,知道每个关键参数调错会直接影响什么,比如采样频率太低会导致峰值截断、噪声滤波过强会抹平真实波动、控制增益设置不当会引起加载振荡。当你能满足这三条,你再去摸设备,错误率会立刻下降一个量级。很多看似“设备问题”的故障,本质上是对原理不了解导致的参数误设,这一点在多轴矢量加载场景下尤为明显,因为不同通道之间的相互耦合会放大你对原理理解的偏差。
第二步:通过标准+SOP把操作固化成“可复制动作”

理解原理之后,下一步就是把每一次操作拆成明确的、可复制的动作链条,而不是凭经验“感觉差不多就行”。我一般会把矢量拉力试验操作拆成五个固定环节:试样确认(规格、批次、热处理或预处理状态)、夹具与传感器选择、装夹与对中校正、试验程序设定(加载路径、速率、控制模式、极限条件)、数据审核与结果判读。每一个环节都写入SOP,并配上现场照片或软件界面截图,让新人按图索骥,而不是靠口头传授。尤其在矢量加载模式下,必须规定清楚不同通道的加载顺序和联动逻辑,否则很容易出现一个通道达到极限但另一个通道还“硬顶”的情况,既危险又浪费试样。落地时,我会在设备旁边贴一张“单页操作卡”,用简洁语言列出启动前、试验中、结束后三个检查清单,让人随手对照勾选,这比厚厚的操作手册实用得多,也更能防止低级失误。
关键要点:把经验变成流程
很多团队的问题不是不会做试验,而是“会的人太少”,知识都藏在少数老员工脑子里,导致一旦换人质量就不稳定。所以我会要求每个成熟项目沉淀一份专属SOP模板,包含五个固定内容:适用范围和不适用范围、试样要求和常见异常、通道配置和典型参数、操作步骤和关键截图、异常处理和停机规则。这样做的好处是,一方面让新人知道什么场景可以用这套流程,什么场景必须找人确认;另一方面也方便后续审查追溯,尤其是当测试数据用于认证或客户仲裁时,有据可查非常关键。此外,通过定期组织“失败案例复盘”,把曾经的错误操作吸收进SOP,形成更新记录,新进人员只要按最新版本执行,踩坑概率会越来越低。久而久之,操作不再依赖某个人,而是依赖一套不断改进的流程体系。
第三步:抓住装夹对中和预加载这两个“翻车高发点”
从实际现场来看,影响矢量拉力试验数据可靠性的头号元凶,不是设备本身,而是试样装夹和对中问题。哪怕你有一台再高级的矢量试验机,如果试样有弯曲、夹具未对齐、接触面有油污或毛刺,力–位移曲线都会出现诡异波动。我的习惯是把装夹分成四个检查点:试样外观(尺寸、缺口、表面处理是否符合标准)、接触面清洁和粗糙度、夹具和试样的对中(轴线、角度)、紧固力矩和重复装夹一致性。对于矢量加载(例如拉–扭或拉–弯组合),还要额外关注夹具之间的同轴度和相对角度误差,否则矢量分解出来的结果会有系统偏差。预加载同样关键,它既是对装夹质量的检验,也是对设备控制参数的一次“模拟彩排”。我一般会使用低于正式试验水平的预载荷,观察各通道的力值和位移反馈是否平滑、是否有异常噪声或突然跳动,再根据情况调整对中或控制参数。

关键要点:用数据验证装夹质量
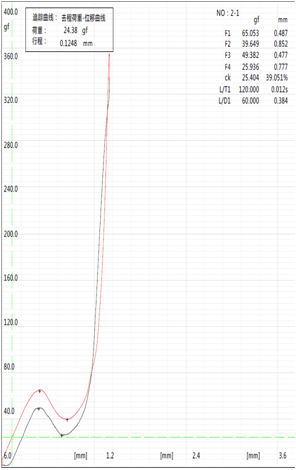
装夹对中最怕“看着还行”,因为肉眼判断往往不可靠,尤其面对尺寸较小或精度要求很高的试样时。我的做法是用数据说话:第一,在预加载阶段记录力–位移曲线,若在低载荷区就出现明显非线性或波动,通常说明装夹或接触有问题;第二,利用设备软件中的多通道监控功能,查看不同方向载荷是否存在异常分量,例如理论只施加轴向拉力,却出现可观的横向力或者扭矩,这往往是对中不良的信号;第三,连续进行几次重复装夹和预加载,对比曲线是否重合,如果每次差异很大,说明操作一致性或夹具状况存在隐患。通过这三种方式,你可以把装夹对中从“凭感觉”升级为“用数据验证”,一旦形成习惯,不仅能提高数据稳定性,还能在早期发现夹具磨损或传感器松动等硬件问题,避免在正式试验中付出更大代价。
第四步:玩转软件设置和数据判读,而不是被界面牵着走
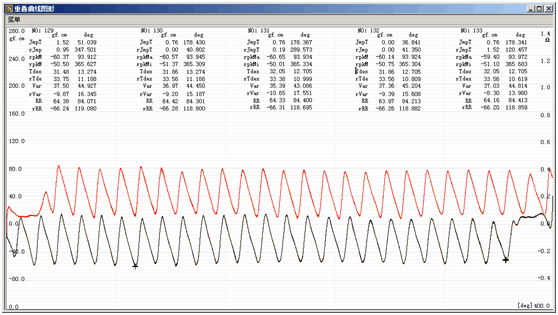
很多人以为学会操作软件就是点点菜单、跑通试验,其实真正的门槛在于你能不能看懂数据,敢不敢质疑“看起来没报错”的结果。矢量拉力试验软件通常包含控制模块(设定波形、加载路径、速度、极限条件)、采集模块(采样率、滤波策略、多通道同步)、分析模块(曲线拟合、特征点识别、矢量分解)三大块。我的经验是,先从“最小可用配置”入手,只保留必需的控制通道和基本的保护极限,把采样参数和滤波选项调到比较保守的设置,确保安全稳定,再逐步增加复杂功能,如多阶段加载、程序循环和自定义矢量路径。数据判读方面,习惯性对比原始曲线和处理后的结果很重要,不要只看软件自动算出来的几个数字。例如,材料屈服点是否采用上屈服还是0.2%塑性应变法,极限强度是否受到局部颈缩或试样缺陷干扰,这些都需要结合曲线形态和试样断口观察来综合判断,而不是完全相信默认算法。
关键要点:建立自己的判读标准

为了让团队在矢量拉力试验的数据判读上达成一致,我通常会组织一次“标定会”:挑选一组典型试验数据,包含正常样本和故意引入问题的样本(如装夹偏心、采样率不合理、预载不足),让大家分别给出屈服强度、极限强度、断后伸长率或矢量合成力等关键指标,然后对比差异,讨论各自判断依据,最终形成一份内部判读标准。这样做的好处是,大家不再只依赖软件默认设置,而是形成共识:哪些曲线形态属于可接受范围,哪些需要重测;哪些异常需要追查装夹和设备,哪些可以在报告中通过备注说明。同时,也可以在软件中建立标准模板和分析脚本,把这些约定固化下来,减少人工选择带来的主观差异。久而久之,你不仅会更熟悉软件的各种高级功能,更重要的是能用它为你服务,而不是被复杂的界面和参数吓住,机械地按惯例操作。
第五步:利用工具和记录习惯构建你的“个人经验库”
要真正掌握矢量拉力试验设备,仅靠几次培训远远不够,关键在于把每一次试验变成可复用的经验。我个人非常推荐的一个落地方法是:建立试验日志和参数模板库。具体做法是准备一个固定格式的电子表单,记录每个项目的试样信息、设备型号、夹具配置、关键参数(加载路径、速率、采样频率、滤波设置、控制模式)、异常现象和最终的改进措施。每当你在某个材料或工况上踩过坑,就在这张表里写清楚“问题–原因–调整–结果”的完整链条。久而久之,你会发现自己拥有了一个针对特定材料和场景的“攻略集”,下次再做类似试验,只要调出对应记录,很快就能确定合理的初始参数,大幅减少摸索时间。这里推荐配合一个简单但高效的工具方式:使用常见表格软件配合版本管理工具将日志按项目归档,并在设备软件中创建对应的参数模板,做到“日志里有经验,软件里有模板”,真正形成闭环。
关键要点:让改进可见、可复制
很多人做了大量试验,但几年下来回头看,能留下来的只有零散记忆,这其实是对时间和经验的浪费。通过日志和模板库,你可以把个人经验沉淀为团队资产,也能更客观地评估自己的成长。我通常会要求每一位操作人员每个月回顾一次自己的试验记录,选择一到两个最典型的改进案例,在小范围内做分享,重点讲清楚三个问题:当时遇到的具体现象是什么(最好附曲线截图)、你是通过哪些排查步骤锁定问题的、最终调整了哪些参数或操作细节,效果如何。这样的分享既是给别人授课,也是帮自己梳理思路。久而久之,你会对矢量拉力试验设备的控制特性、不同材料的响应差异以及各种异常的典型“指纹”越来越熟悉,遇到新问题时也更有底气。说白了,设备只是工具,真正决定你水平的,是你有没有系统地积累和复盘,而不是你在设备前站了多少年。
TAG: