如何通过五步骤提升芯片推拉力检测仪的精准度与稳定性
第一步:先把“力”和“位移”的基准校准到位
我接手过不少现场项目,发现很多推拉力检测仪测不准,问题根源不是算法,而是最基础的力值和位移基准没校准好。芯片推拉力测试本质上是一个力学量程和位移闭环的测量问题,任何一点偏差都会放大成“良率下滑”或者“产线争议”。我自己的做法是:先明确设备的目标量程和精度,比如0–50N范围内要求±0.5%FS,再根据这个指标重新规划校准点,通常至少做五点校准(0%、25%、50%、75%、100%),同时要配套标准砝码或标准传感器。位移部分很多人忽视,推针行程误差会直接影响接触状态判断,我会用激光位移计或高精度千分表对位移传感器做独立验证,确保在关键位移区间误差可控。另外要强调,校准时环境温度和安装状态必须和实际生产环境高度一致,否则“实验室很准,产线全跑偏”。只有当力和位移两个“尺子”真正对齐,后面谈稳定性和数据优化才有意义,否则都是在补洞。
核心要点:校准环节不能省
在这个步骤上,我给出的第一条实用建议是:力值和位移必须分开做独立溯源校准,再做系统联合验证,避免“错中有错”互相抵消导致假精度。第二条建议是:校准点要覆盖实际工艺的主要使用区间,比如大部分芯片推力集中在5–15N,就要在这个区间加密点位,而不是只在两端做形式校准。第三条建议是:建立一套可追踪的校准记录,包括时间、人员、标准器具、环境条件和校准前后的偏差,这样后续一旦出现数据漂移,可以快速回溯判断是传感器老化还是环境异常。对于设备刚上线或刚大修后,我会要求至少一周内高频校准(例如每天一次),观察漂移趋势,如果一开始漂移就很大,那就说明机械或电子链路还有隐患,不能指望“时间久了就稳定”,这在现场几乎从未发生过。
第二步:从机械结构源头减少“抖”和“偏心”

很多人一提精度马上想到传感器等级,其实在芯片推拉力检测中,机械结构设计的好坏对结果影响不亚于传感器。芯片本体很小,焊点、引脚或者凸点对力的敏感度极高,一点倾斜或偏心就能让测量数据飘得离谱。我在项目中会优先检查三个点:一是导轨或滑台是否有明显间隙或摩擦不均,如果滑动阻力不稳定,再好的传感器也救不了;二是推针或夹具是否做到同轴度控制,比如推头中心线与传感器中心的偏差要控制在几十微米级别,否则力线就会偏;三是样品夹紧方式是否重复定位可靠,允许的游隙必须小于工艺容差的三分之一。机械部分尽量做到“运动方向单一、约束明确、无多余自由度”,我通常会让结构工程师和工艺工程师一起过一遍力的传递路径,确保从执行端到传感器的每一个接触面都清晰可控,而不是依赖“装配师傅经验”。
核心要点:夹具和对位设计要严谨
这里给三条落地建议。第一,优先优化夹具而不是堆砌传感器精度,把夹具设计成带有自导向和自对中的结构,例如锥度导向、V型槽支撑,可以显著减少偏心力带来的测量波动。第二,对关键部件(推针、夹爪、导轨)制定装配扭矩和装配顺序规范,避免因螺丝拧多一点就引入应力变形,导致同一台机不同时段表现不一致。第三,建立简单可执行的机械点检表,比如每班用标准滑块来回跑几次,检查导轨顺畅度和回程间隙,一旦发现卡滞或者异响,立刻暂停测试,先排查机械问题。说得直白点,机械部分如果“松松垮垮”,你在软件里怎么滤波都只能是救火。
第三步:做好采样、滤波和节拍控制
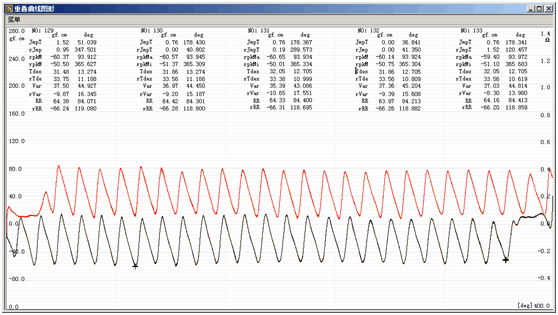
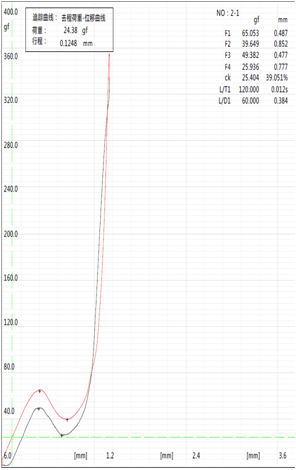
在电子和软件层面,采样策略和滤波算法对推拉力检测的稳定性影响很大。芯片推拉测试往往涉及快速加载和瞬时峰值,如果采样频率过低或者采样与机械节拍不同步,就会产生“抓不到真正峰值”或“结果跳动”的情况。我一般会根据加载速度来确定采样频率,例如推力变化时间常数在几十毫秒,那采样频率至少要在1kHz级别,保证在峰值附近有足够多的样本点。另外,我会强烈建议将硬件采样与运动控制指令关联,通过触发信号或时间戳实现对齐,而不是简单按固定周期去采。滤波方面,不建议一味加大平滑力度,因为这容易把真实波动也抹平,我常用的方法是结合中值滤波和有限窗口内的峰值检测,在抑制偶发干扰的同时保留应有的突变特征。节拍控制也很关键,推到位后要设置足够稳定时间再读取结果,避免在结构仍在微振动时采点,这一点在高速产线上非常容易被忽略。

核心要点:数据处理既要“稳”也要“真”
在数据处理方面,第一条实用建议是:对不同工艺段设置不同的采样配置,例如引脚推力、盖板拉力、焊球剪切可能需要不同的采样频率和滤波窗口,不要指望一套参数打天下。第二条建议是:在软件层增加“异常波形标记”功能,比如检测到多峰值、振荡或超出物理合理范围时记录为可疑数据,而不是直接参与统计和判定,这能大幅减少误判引起的生产纠纷。第三条建议是:将峰值力、加载速率、位移曲线等关键特征参数保存下来,用于后续工艺优化,而不是只保留一个单一合格判定。实际经验里,通过分析这些特征,可以发现例如夹具磨损、润滑不良、芯片批次差异等问题来源,真正把测试数据变成工艺改进的输入,而不是“过关/不过关”的黑箱。
第四步:控制环境与温飘,降低长期漂移
推拉力检测仪用久了,很多人吐槽“刚买来挺准的,现在怎么老跑偏”。这背后一大块原因是环境因素和温度漂移没有被系统管理。传感器、放大电路和机械结构都会受到温度、湿度和振动的影响,尤其在封装车间,冷热交替明显时,零点漂移会非常突出。我的做法是把环境控制当作系统的一部分来设计:在设备安装位置做基本的环境评估,尽量远离强振动源和强气流,比如大型风机、压缩机或者频繁开启的门禁;对于高精度需求,则考虑在局部区域做微环境封闭,比如加装轻型罩壳和简单的温度稳定模块。温度方面,可以通过在设备内部添加温度传感器并记录温度随时间的变化,长期分析不同温度点的偏移趋势,从而建立温度补偿模型或至少制定温度工作区间。很多时候,不是传感器不好,而是我们没有给它一个“舒适”的工作环境。
核心要点:建立可执行的环境管理制度

在环境管理上,第一条可落地建议是:为每台关键检测设备设定允许的工作温度区间,比如20–26℃,超过范围则在软件上给出提示甚至锁定测试权限,避免在极端条件下继续“硬测”。第二条建议是:将零点漂移检查纳入班前点检流程,用标准试块或内置标定程序快速检测零点偏移,一旦超过设定阈值(例如±0.3%FS),要求重新校准或通知维护。第三条建议是:在设备附近放置简易环境监控装置,定期导出环境数据与测试结果对比,发现明显相关性时及时调整设备布局或加装隔振、隔风措施。长期坚持下来,你会发现设备“脾气”变小了,数据也不再忽好忽坏,生产和质量部门的摩擦自然就会少很多。
第五步:用数据闭环持续优化,别把检测仪当“黑箱”
最后一步,是很多工厂最容易忽略但实际价值最高的:建立数据闭环,让芯片推拉力检测仪从“合格判定工具”升级为“工艺改善工具”。在我的实践中,凡是能把检测数据和工艺参数关联起来的产线,良率改善速度都更快。具体做法是:首先规范数据结构,不仅记录最终推拉力结果和合格状态,还要保存时间戳、机台号、程序版本、夹具编号、操作人员以及关键曲线数据。其次,定期对数据进行统计分析,例如不同批次芯片的力值分布、同一台设备在不同时间段的偏移、不同夹具之间的一致性差异,这些都能直接指向问题所在。当发现某一工位或某一夹具的波动明显大于平均水平时,就可以有针对性地做维护或培训,而不是笼统地“大家都注意一下”。一旦这种用数据说话的机制建立起来,检测仪的精准度和稳定性就不再是“一次调好就完事”,而是一个持续迭代的过程。
落地方法与推荐工具
在落地层面,我推荐两个比较实用的方法和工具。第一个方法是引入简单的SPC统计过程控制,将关键推拉力参数接入到SPC软件或自建的统计模块中,利用控制图监控过程稳定度,一旦发现趋势偏移或波动放大,提前预警,而不是等到大批量不良出现才追溯。第二个是使用数据采集和分析工具,把检测仪通过标准接口(如Modbus、Ethernet或串口)接入上位机或MES系统,至少实现自动数据采集和基本可视化,不要再依赖人工抄写和零散的Excel。实在条件有限,哪怕用一台普通工控机配合开源数据库和可视化工具,也足够搭建一套基础平台。实践证明,只要数据连得起来、看得清楚,设备的精准度和稳定性问题就都变得可被管理和优化,而不再是“看运气”的事情。
TAG: 芯片剪切力 | 芯片剪切力测试仪 | 芯片剪切力实验机 |